The navigation for robot movement in space
Application Area:
Allows moving the robot in space in various ways.
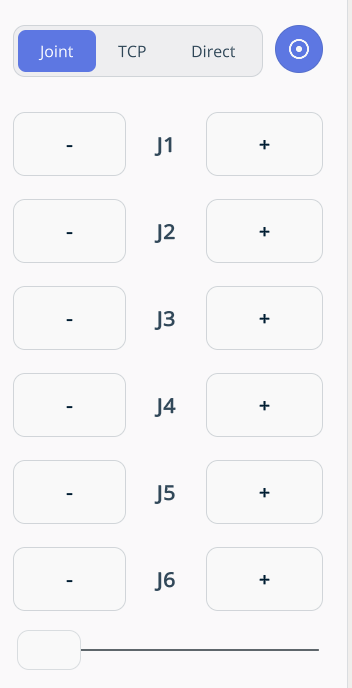
Joint Mode.
Allows moving the robot by controlling individual axes.

TCP Mode.
Move the robot in the Tool Center Point (TCP) coordinate system. Handy for intuitive positioning parts.
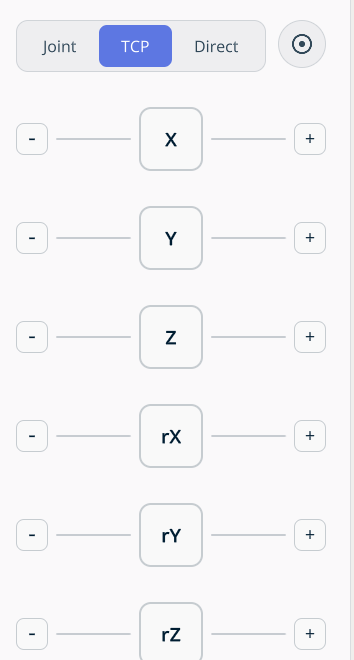
If you press the TCP mode button a second time, the XY‑plane TCP movement mode appears (optimized for joystick control).

Precision mode
Сan be enabled for all operating modes. This reduces the movement step to prevent the robot from colliding with obstacles. ![]()
The movement step is set at the bottom as a slider.