Point welding operation
Operation can be used to ![]() Tack weld and
Tack weld and ![]() Spot weld.
Spot weld.
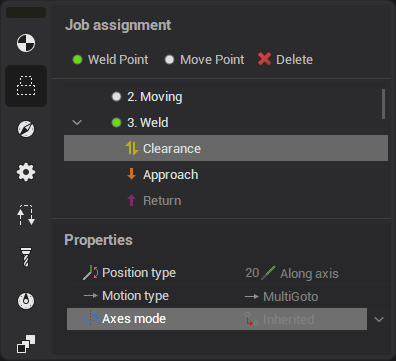
Job assignment
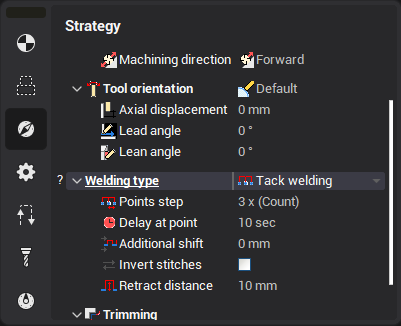
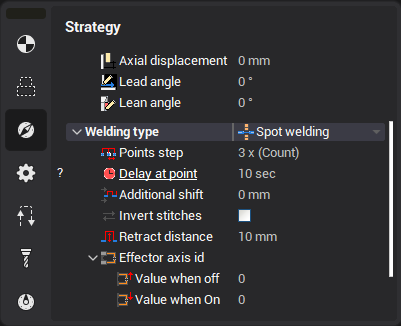
In the strategy tab, you need to select the type of welding:
|
|
|
|
|
|
For both types the job assignment is the same.
The job assignment ![]() consists of two types of points:
consists of two types of points:
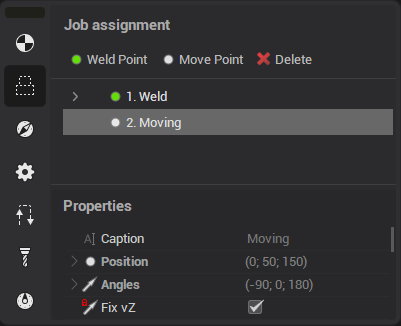
 Weld Point
Weld Point Move Point
Move Point
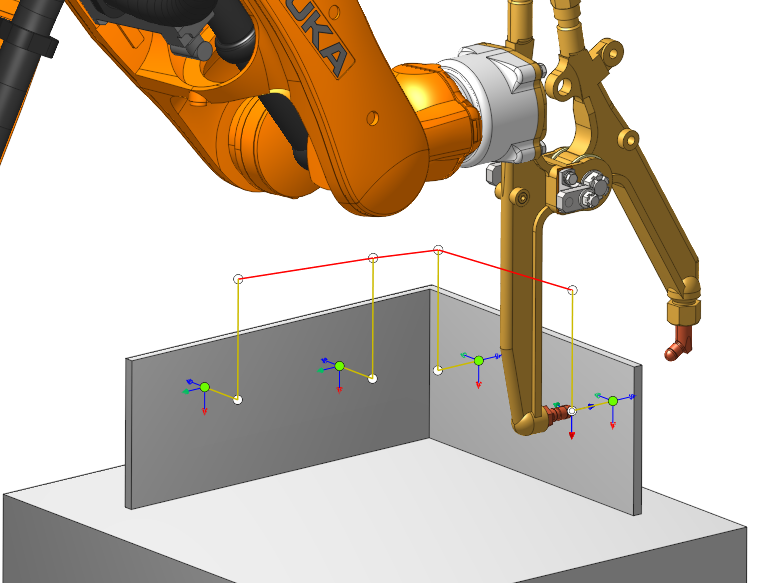
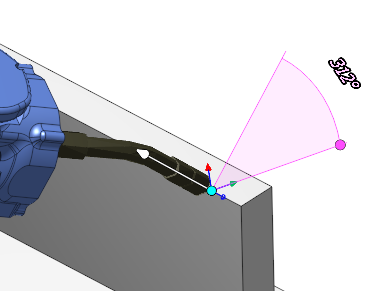
These points can be used to construct a chain of trajectories:
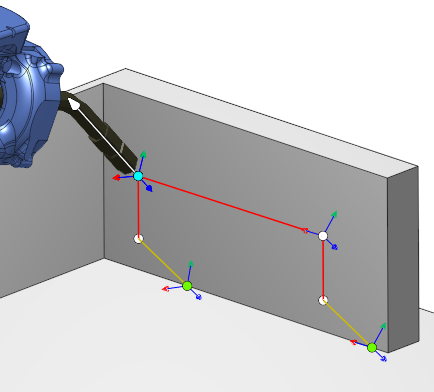
Drag points
These points can be moved by dragging.
They attach to faces ![]() , curves
, curves![]() , splines
, splines![]() , edges
, edges![]() , vertices
, vertices![]() . Tool axis rotates automatically when attached.
. Tool axis rotates automatically when attached.
Move points can be easily moved using Smart snap  :
:
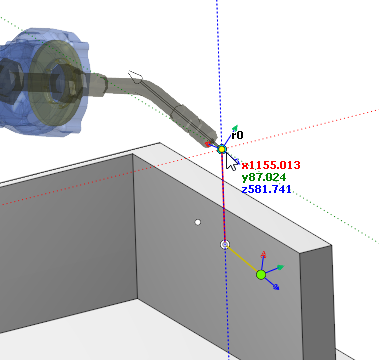
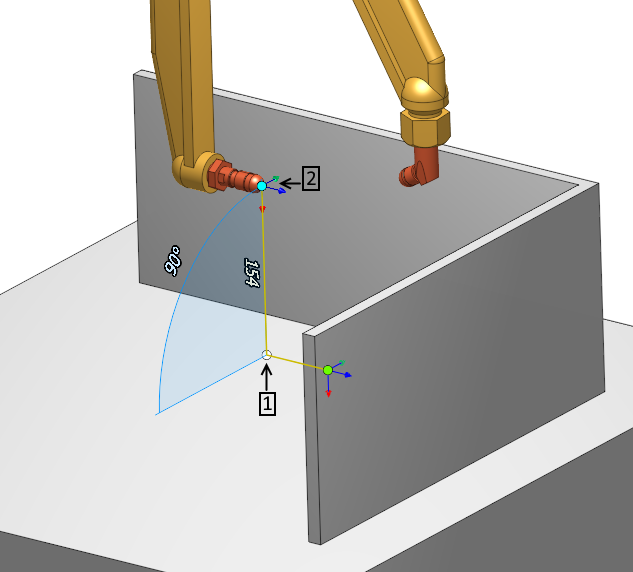
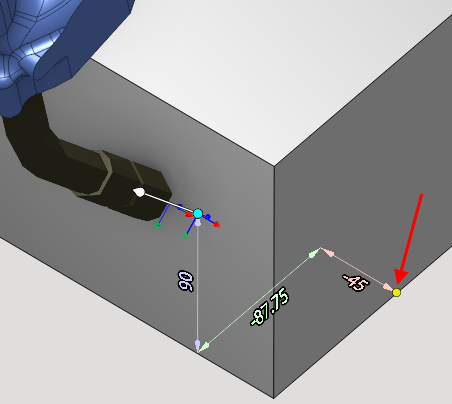
Position of the point can also be specified as an offset from the auxiliary yellow point.
To do this, first select the yellow point:
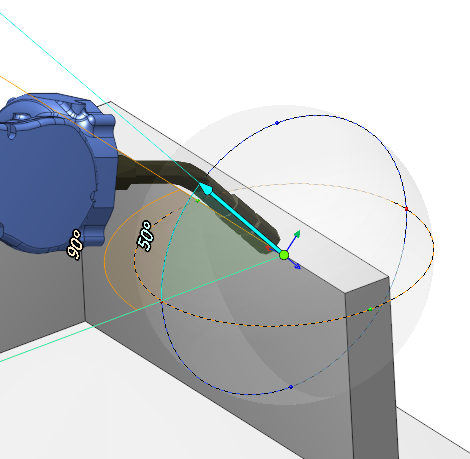
You can also rotate the axis vector by dragging the visual vector:
Point parameters
Points contains the following parameters:
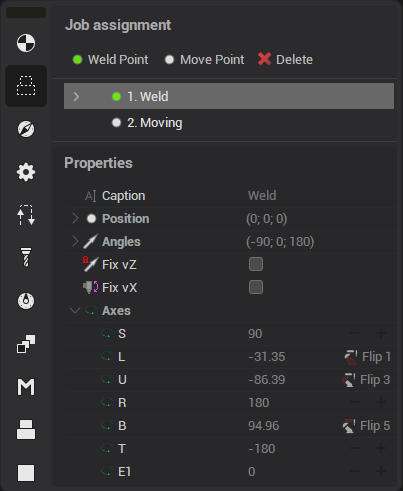
Weld Point
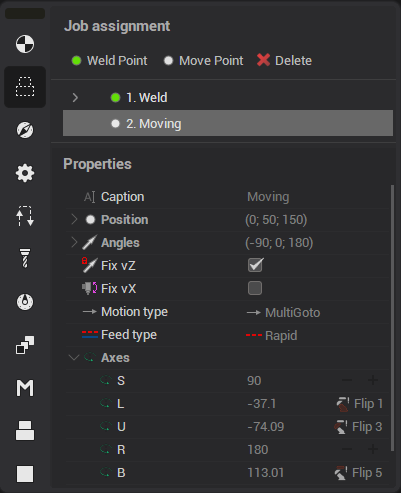
![]() Move Point
Move Point
![]() Caption - point name
Caption - point name
![]() Position - point coordinates.
Position - point coordinates.
![]() Angles - tool axis inclination angle at point
Angles - tool axis inclination angle at point
![]() Fix vZ - if enabled point vector does not change when dragged
Fix vZ - if enabled point vector does not change when dragged
![]() Fix vX - enable 6 axis edit mode:
Fix vX - enable 6 axis edit mode:
 Motion type - is set by what type to move to the point:
Motion type - is set by what type to move to the point:
-
MultiGoto - Multi coordinate movement
 PhysicGoto - Physical machine axes movement
PhysicGoto - Physical machine axes movement Avoid collisions - Collision avoidance movement
Avoid collisions - Collision avoidance movement
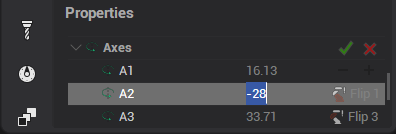
![]() Axes - machine axis at the current point.
Axes - machine axis at the current point.
When changing axes, two buttons appear:
 - moves the point to the tip of the machine
- moves the point to the tip of the machine
![]() - returns previous values
- returns previous values

![]() - 360/+360
- 360/+360
![]() Flip - controls flips in the robot
Flip - controls flips in the robot
Auxiliary Point
![]() Weld point also contains additional auxiliary points:
Weld point also contains additional auxiliary points:
Clearence
Engage
Retract