Setup panel
Application area:
The Setup tab is used to configure the primary parameters of the project. This can involve the positioning of the part on the equipment, the coordinate system of the part, and more.
Setup and tooling.
Simulation Method.
It changes the modeling method. Each of these modes has its own advantages and disadvantages. 'Voxel 5D' is the default mode. It allows for quick modeling, whereas 'Solid' modeling takes longer but offers greater precision. For instance, when working on small holes in a large part, choosing 'Solid' modeling would be necessary.
Tool orientation.
It determines the orientation direction of the tool. See more
This group specifies the primary rotational axes.
Tool coordinates in WCS
This tab displays geometric coordinate systems. In parentheses, showed the name of the physical axis corresponding to movement along a specific axis.
Linear physical axes
Coordinates values of the linear axes of the machine concerning the physical zero point of that axis (the end sensor of that axis). Here, display all the primary physical coordinates of axes not involved in the Tool coordinates in WCS.
Other axes
This group specifies the auxiliary axes, such as the axes related to the movement of chuck jaws.
Axes map
The Axes Map allows to define manual and fine-tune automatic control laws for the excessive degrees of freedom of a robot (the 6th axis, the rails axes, the rotary table axes). The feature is available by pressing the ellipsis button next to the Axes map parameter. To optimize processing, it's possible to switch between different available axes of the equipment.

6th axis control
To position an axial tool (mill, beam, jet), five degrees of freedom are required. A standard industrial robot has six axes. If the tool is not aligned with the rotation axis of the robot's last joint, there are infinite possibilities to position the robot precisely at a particular point by rotating the tool around its own axis. This provides additional flexibility in accessing hard-to-reach areas, helps circumvent various kinematic singularities, and avoids mechanical collisions between equipment components See more
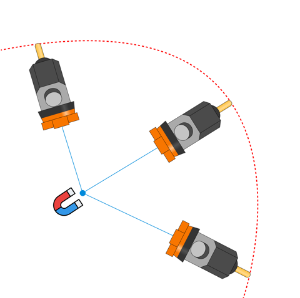
Direct to point.
In this mode you specify a 3d point which attracts the point of intersection of the 5th and 6th axes to the minimum distance during the machining.
Point.
Robot base point. In this mode, the point will be positioned at the robot's home/base point
Robot elbow point. In this mode, the point will be positioned at the robot's elbow point.
Custom. In this mode, the location of the point will be determined according to the user's instructions.
Fixed vector.
In this mode you define the desired direction of the robot flange (6th axis) in the coordinate system of the robot base.
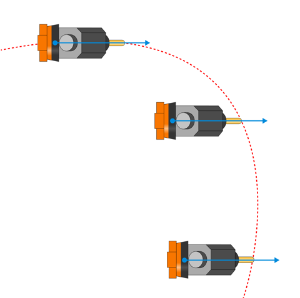
Vector. Vector for the 6th axis of the robot.
Tool path
In this mode one axis of TCP is aligned with the tool path direction.
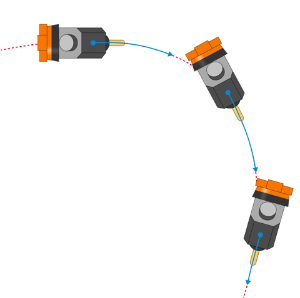
Angular deviation. Defines an additional angle for the 6th axis along the tool.
Tangent approximation